
鞭毛和纤毛作为细胞的运动附属物,在众多生物系统中扮演着推进、进食、运输等关键角色。研究表明,尽管它们都源自相同的9+2轴丝生物结构,却采用了截然不同的运动策略来支持生命活动:鞭毛通过手性波形,如二维平面波运动和三维螺旋波运动,来推进自身;而纤毛则依赖二维或三维的不对称搏动来实现有效运动。
至今,科学家们已经根据这些不同的运动策略,开发出了众多仿生致动器,并成功应用于微型机器人、微流控等多个工程领域。然而,一个有趣且富有挑战性的事实是,尽管这些真核鞭毛/纤毛的运动模式多样,但它们都起源于相同的生物结构。遗憾的是,由于对这一复杂内部结构和机制缺乏统一的视角和深刻的理解,从工程角度出发,设计出一个能够支撑不同鞭毛/纤毛运动模式的统一架构,依然是一项艰巨的挑战。
前不久,来自香港科技大学的申亚京教授研究团队,为了更深入地探索真核鞭毛/纤毛生物如何从共同的结构起源演化出多样的运动模式,以及这一过程中所蕴含的自然智慧,对该类生物的鞭毛/纤毛内部结构及其驱动机制进行了详尽的研究。他们推导出了一个统一的物理模型,用以描述由内部微管结构弯曲导致的外部运动,并提出了一个基于三通道的管状驱动新概念。
为了实践这一理念,研究团队还采用了杆嵌入铸造工艺来制造致动器。通过对每个通道的驱动进行精心排序,他们的设计不仅能够重现自然界中丰富多样的二维/三维鞭毛/纤毛运动模式,还能够拓展出多种对称破缺的纤毛摆动模式,从而实现低雷诺数环境下的有效推进。这一研究成果不仅加深了对微生物推进机制的理解,还为仿生系统的设计提供了新的灵感,有望在广泛的工程领域中得到应用和推广kaiyun开体育官方。
该研究成果相关论文已以《Flagellar/Ciliary Intrinsic Driven Mechanism Inspired All-in-One Tubular Robotic Actuator》为题发表在中国工程院院刊《Engineering》。论文第一作者为香港城市大学苗佳麒和张铁山,共同作者包括香港城市大学李根、郭栋、孙思琦、谭蓉以及新加坡国立大学史家海教授,通讯作者为香港科技大学申亚京教授。
通过探索鞭毛/纤毛的内在驱动机制,研究团队提出了一个创新的物理模型,深入揭示了鞭毛和纤毛运动的内在机理。
该模型的核心聚焦于鞭毛和纤毛展现出的独特9+2结构,这一结构构由九个双联微管(DMT)和一个中心对复合体(CPC)精巧构成。在连接蛋白的精密调控下,运动蛋白在相邻DMT间发生滑动,从而诱发DMT的弯曲现象。这一机制使得鞭毛/纤毛的每一微小部分都能独立运动,而当这种DMT弯曲从根部逐步传递至尾部时,最终实现了整体的外部运动。
为了深度解析鞭毛/纤毛的内在驱动机制,并提炼出统一的原理,研究人员选择了连续鞭毛/纤毛中的一个无穷小元素(标记为δl)进行深入研究。他们发现,以δl中的DMT8和9为例,弯曲运动可以看作是动力蛋白所引发的力的效应。通过设定每个动力蛋白都施加一个恒定的微力,研究人员成功地得到了δl中DMT8与DMT9之间动力蛋白所产生的总力。
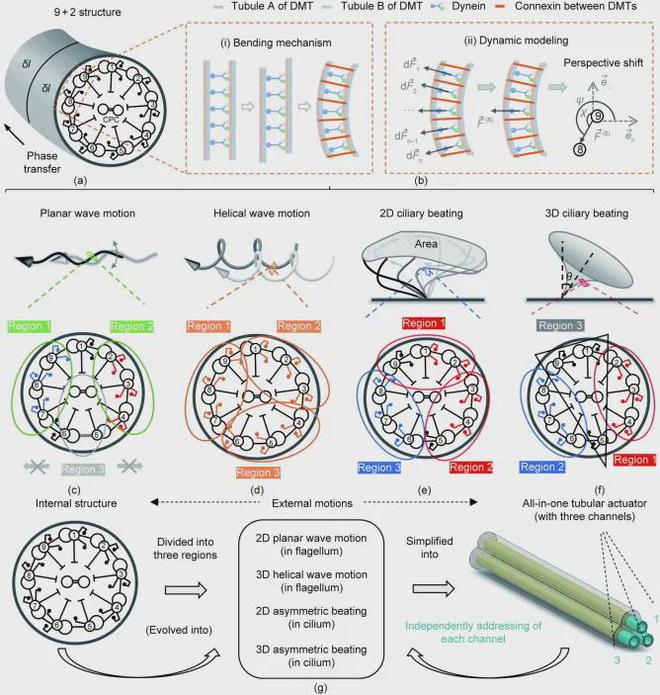
进一步地,研究人员对两个DMT之间的力进行了数学表示,并明确了其方向性。他们指出,力的方向是由DMT N+1指向DMT N(其中N=1-9,特别地,当N=9时,N+1代表1)。同时,他们还给出了横截面运动的合力的数学表达式。这一处理使得研究人员能够从横截面的独特视角去探讨和解释不同的运动驱动机制。
研究人员发现,周期性的横截面运动沿着鞭毛/纤毛的细长体传递kaiyun开体育官方,并伴随相位差,最终形成了我们所观察到的外部鞭毛/纤毛运动。在一个完整的运动周期内,研究人员用特定的符号来表示特定的运动状态,Kaiyun官方网并通过数学公式对最终的外部运动进行了详尽的描述。
这一统一模型的提出,为鞭毛/纤毛的运动机制提供了新的理解角度。它清晰地揭示了鞭毛/纤毛的横截面运动在其整体运动中的主导作用,阐明了这些横截面运动如何沿着鞭毛/纤毛的细长体传播,并最终决定了其外部游泳方式。
基于模型,研究人员深入研究了多种鞭毛/纤毛运动的驱动机制,并发现它们均可视为由三个功能区域采用不同的驱动策略所产生的。功能区可以是(1)交替激活/抑制状态;(2)恒定激活状态;和(3)恒定抑制状态。
由于简化的功能区间连结在同一鞭毛/纤毛结构来执行丰富的运动,因此研究人员相应地设计了通过杆嵌入铸造工艺制造的一体式管状软体致动器,并内设了三个可由流体驱动的通道,旨在精确复制鞭毛/纤毛的复杂运动。
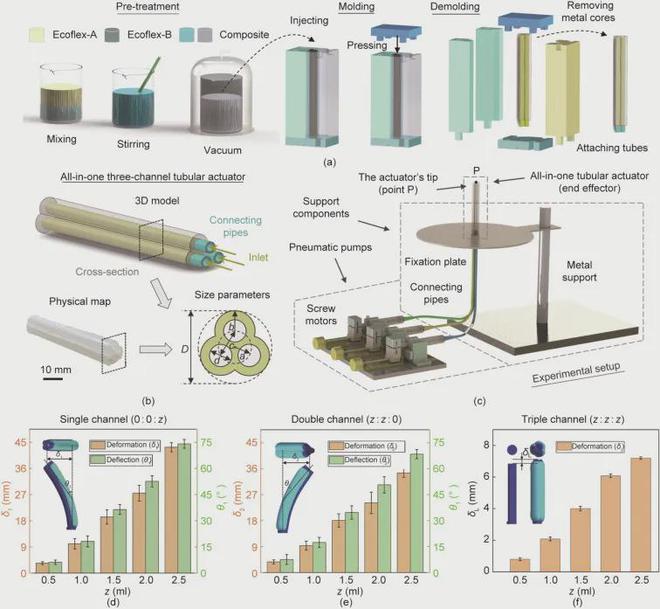
在制造过程中,研究人员选用了硅橡胶(Ecoflex 00–30)作为主体材料,通过嵌棒铸造工艺精心打造。他们首先将Ecoflex-A和Ecoflex-B按1:1的比例混合,并在真空条件下搅拌除气,以获得均质复合弹性体。随后,将其注入嵌入三根金属棒的3D打印五件式模具中。经过12小时的固化后,通过移除模具和金属棒,将三通道软体执行器巧妙脱模。最后,用新的未固化的Ecoflex 00–30密封执行器的尖端,并将三个通道分别连接到连接管,同样用未固化的Ecoflex 00–30进行密封。这样,一款长度为65毫米、拥有三个直径约为3毫米通道的执行器便制造完成了。
该管状执行器由气动泵系统驱动,其工作原理与9+2结构中DMT的排列方式相似。当压缩空气沿柔性通道注入时,由于压力不平衡,执行器会产生横向弯曲,这与生物体内动力蛋白运动和固定连接蛋白限制下产生的弯曲现象高度相似。这种仿生驱动器将在后续研究中用于呈现各种鞭毛/纤毛运动的横截面运动。
为了全面评估这款管状驱动器的性能,研究人员对其进行了单通道、双通道、三通道充气标定实验。他们定义了变形长度(δ1 、δ2 、δL)和偏转角(θ1和θ2)等参数,并获得了不同充气量下这些参数的变化情况。实验结果显示,当充气量从0变为2.5毫升时,各参数均发生了显著变化,这表明相对运动误差对于不同运动方式的验证和演示是可以接受的。
值得注意的是,这款执行器的误差主要来源于制造误差和气动泵系统的机械误差。然而,通过采用精细的制造技术和高精度控制系统,有望进一步提高其运动精度。特别是当仿生系统应用于微流体系统等小型操控装置时,精确的运动控制和稳定性将至关重要。
除了气动驱动之外,这款制动器的设计概念还可以通过其他驱动机制来实现。研究人员表示,执行器有望集成化,并具有独立可控的内部响应单元。这些单元共同作用,将展现出独特且多变的外部运动。这一设计原理和驱动策略也有望应用于其他具有类似特点的仿生系统,为其带来丰富的运动方式。
三通道管状驱动器为探索鞭毛/纤毛的运动机制提供了一个全新的平台。它不仅可再现自然界中的复杂运动模式,还能通过拓展新的运动类型和设计策略,为理解生物系统的物理机制和设计仿生系统提供新的视角和灵感。
借助所研发的一体式三通道软体致动器平台,研究人员通过编程不同通道的驱动模式成功再现了自然界中多样的鞭毛/纤毛运动轨迹,包括鞭毛的平面波动、螺旋波动以及纤毛的二维和三维拍动运动。
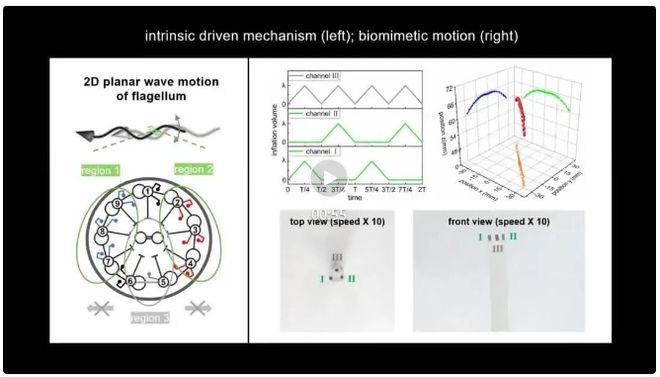
具体来说,对于鞭毛的平面波动,研究团队通过交替对两个通道充气/放气,同时保持第三个通道提供限制以纠正弯曲方向,从而实现了与自然鞭毛相似的平面弯曲轨迹。
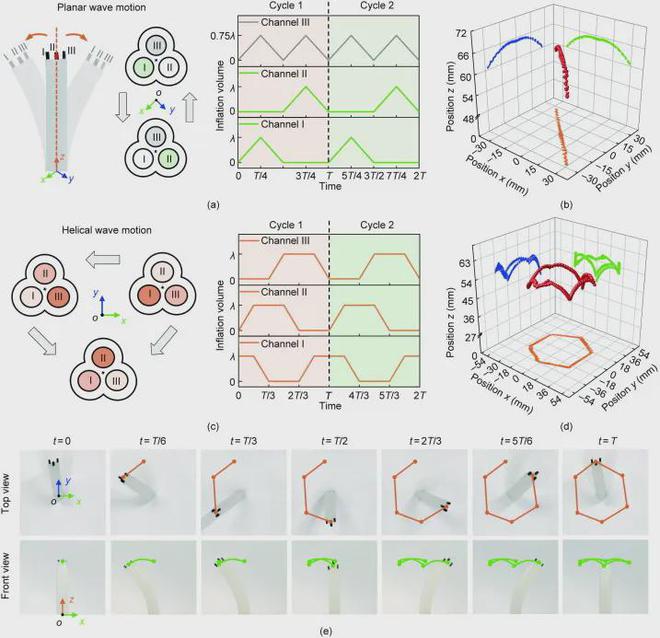
而对于螺旋波动,他们则依次充气三个通道,执行器呈现出近乎圆形的轨迹,很好地再现了螺旋波运动的横截面运动。
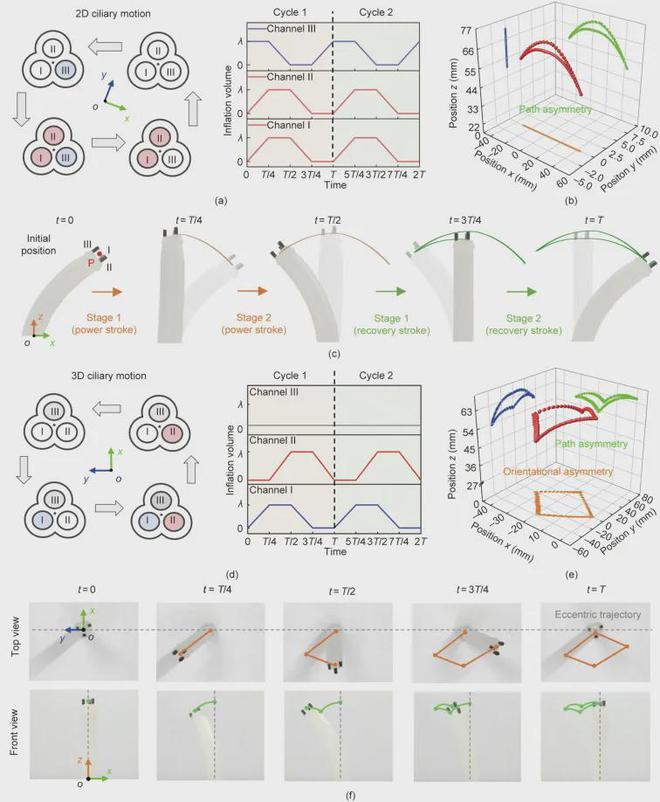
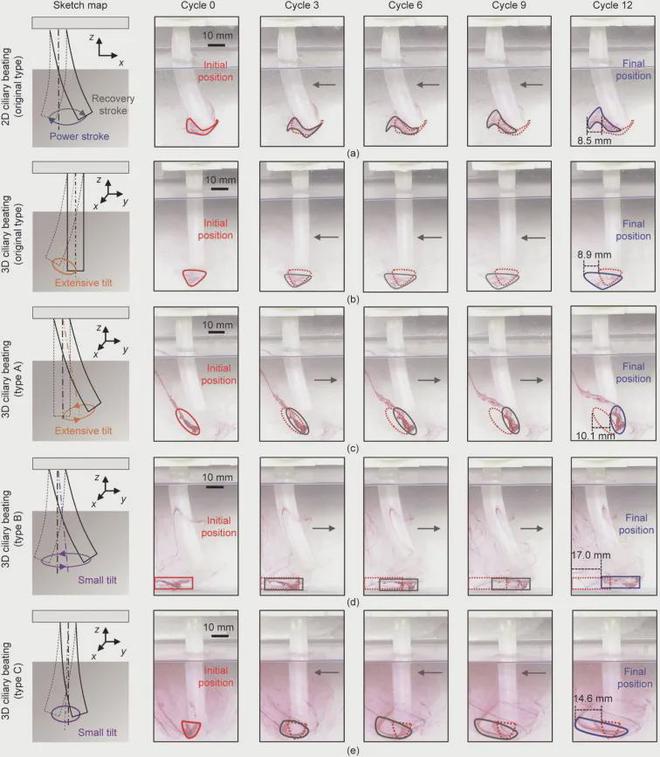
在模拟纤毛运动时,研究人员同样展示了出色的控制能力。二维纤毛摆动的整个运动周期由具有不同路径的一个动力冲程和一个恢复冲程组成,驱动器通过特定的充气/放气策略成功模拟了这一过程。对于三维纤毛摆动,驱动器也能够表现出轨迹的平均轴偏离表面法线的方向不对称性,进一步验证了其在模拟复杂纤毛运动方面的能力。
基于所建立的简化模型,研究人员通过为三个通道的驱动策略主动引入特定的非对称性,进一步扩展出了多种新型非对称纤毛搏动模式。
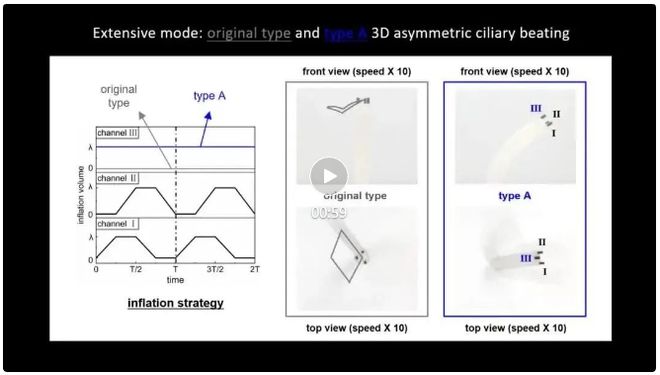
通过改变执行器三个通道的充气变化,研究人员引入了新的不对称性,从而衍生出新的纤毛摆动模式。他们选择了原始三维纤毛摆动中的一个通道,并通过改变其充气体积,分别实现了A型、B型和C型三种新的摆动模式。
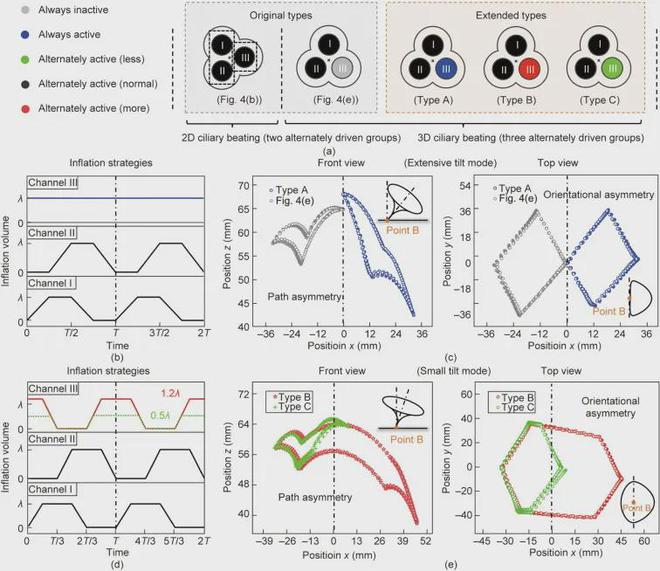
对于A型摆动,研究人员在整个运动周期内将执行器的一个通道从零变为恒定的充气量,同时保持其他参数不变。这种新的驱动方式破坏了弯曲变形向各个方向的一致性,导致路径和方向的不对称,从而延伸出一种新的三维纤毛摆动类型。而对于B型和C型摆动,研究人员则改变了另一个通道的峰值充气体积,同时保持其他两个通道的峰值体积并交替充气/放气。这种峰值膨胀体积的变化同样导致了不对称特性,产生了新类型的纤毛摆动。
研究中,研究人员将管状执行器浸入硅油中,并按照特定的驱动策略向三个通道中充气来驱动执行器。他们记录了红色标记流体的运动,以评估不同推进模式的效率。在这些实验中,估计的雷诺数非常低,仅为0.014,这模拟了微观生物在高粘度环境中的运动情况。
实验结果显示,五种不同的纤毛摆动模式都能在低雷诺数下为流体提供有效的推进力。具体来说,原始的二维纤毛拍动通过动力冲程和恢复冲程的不同路径形成扫掠区域,从而推动流体向左移动。而对于三维纤毛摆动,其方向不对称性导致了轨迹偏心方向的净位移,进一步验证了其在低雷诺数环境下的推进效果。
值得注意的是,与非对称纤毛摆动不同,鞭毛的横截面运动不能直接推动流体。这是由于鞭毛的对称往复摆动(平面波动)和旋转(螺旋波动)受斯托克斯流体力学物理定律的限制。为了实现有效的推进,鞭毛需要细长的尾部来传递沿身体的横截面运动,形成手性波。


